■
概要
●
本コマンドは、IP法に準じた方法で定義された「直線と円弧またはクロソイド曲線」で構成された「車の走行ルート」を作成し、指定したピッチで軌跡を作成します。
●
道路上を走行するような比較的長い走行ルートの旋回軌跡に適しています。
●
「走行ルート」の[IPポイント]は自由に移動・追加・削除が可能です。
●
「走行ルート」はマウスドラッグ操作にてダイナミックに変形移動することが可能です。
●
作業画面の背景を透過させることができますので、図面の敷地や道路に合わせた調整が可能です。
●
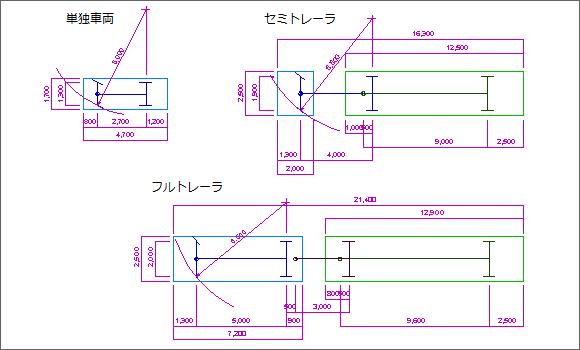
複数の車両種別に対応しています。 [単独車両/セミトレーラ/フルトレーラ]
●
複数の現実的な旋回方法に対応しています。[初期ハンドル角ゼロ/止まりハンドル/クロソイド曲線]
●
実績のある作図理論を採用しています。[JASO Z006-92によるプロッタ法]
●
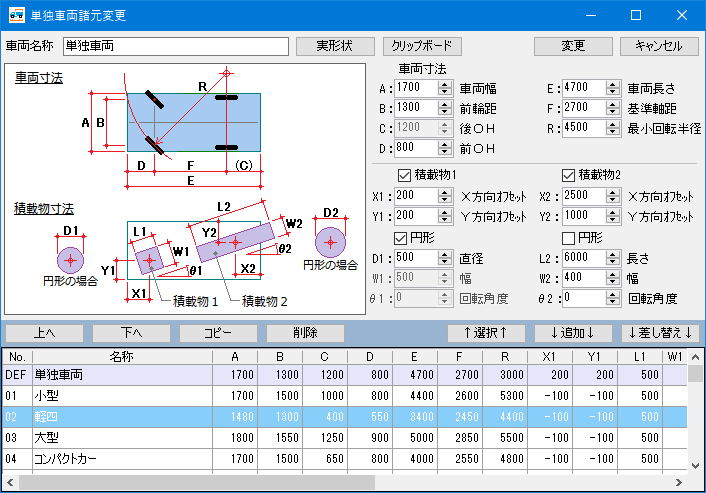
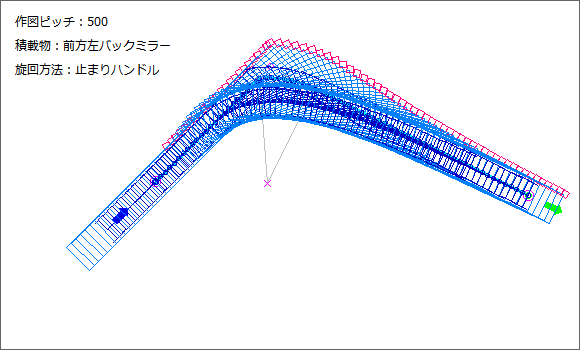
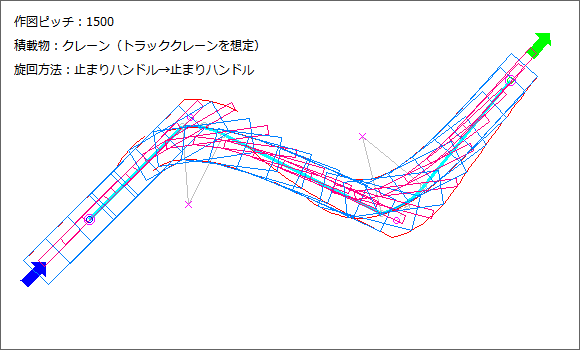
単独車両には積載物を2つまで配置することができ、バックミラーやクレーンとして検討が可能です。
●
道路や街区の図面を背景にして車両を移動させた走行シミュレーションが可能です。
●
駐車場計画や搬入路計画にご利用いただけます。
■
主な機能
|
機能
|
説明
|
|
対応旋回方法
|
ハンドル角ゼロ/止まりハンドル/クロソイド
※バック旋回には対応していません。
|
|
対応車両種別
|
単独車両(一般乗用車、トラック、バスなど)
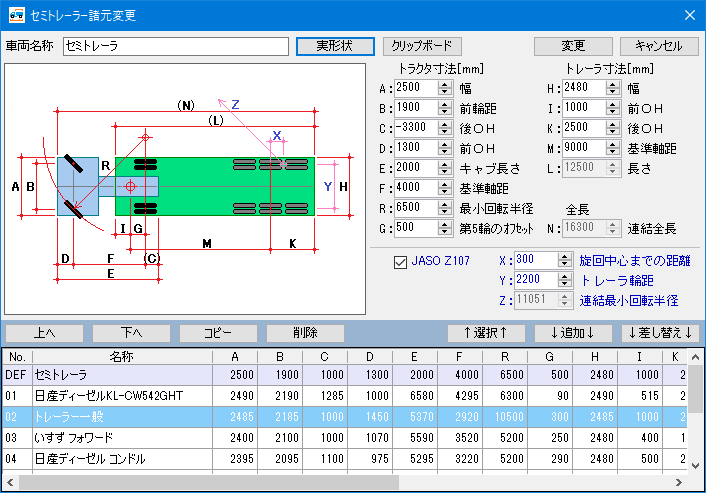
セミトレーラ(トラクタ+トレーラ[連結])
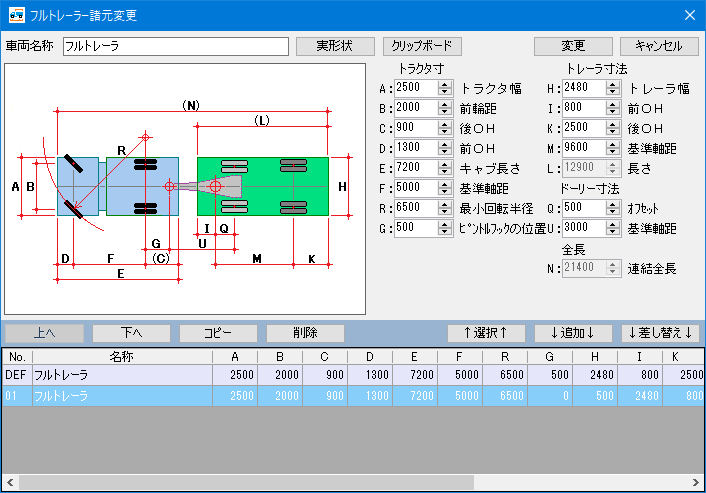
フルトレーラ(トラクタ+ドーリー+トレーラ[連結])
※単独車両には積載物の配置が可能です。
|
|
作図機能
|
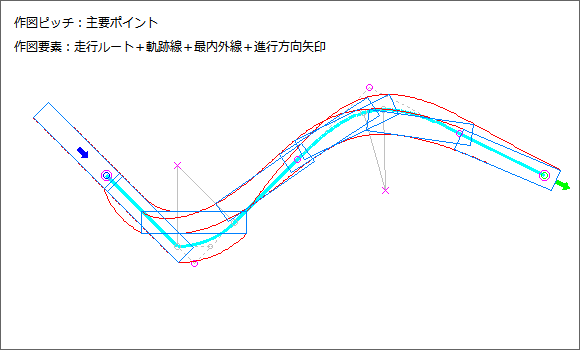
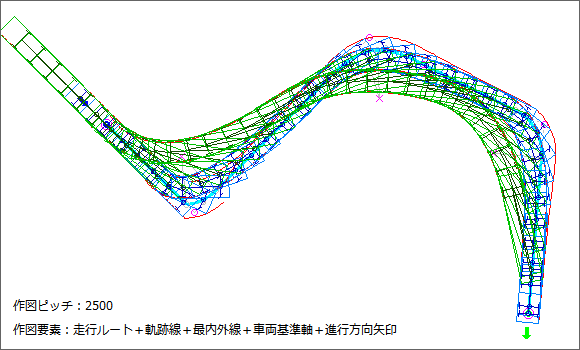
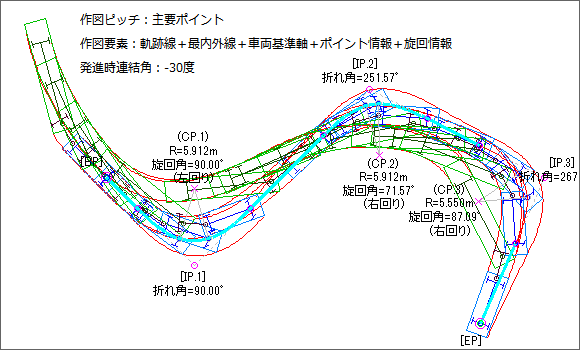
軌跡線、車両基準線、最内外線、旋回中心点、旋回開始・終了ポイント・旋回情報
IP間距離、進行方向矢印等
|
|
走行シミュレーション
|
自動走行:任意のスピードによる走行
手動走行:任意の位置の走行状態
|
|
背景透過による重ね合わせ
|
背景を透過することにより、地図や道路に沿うように軌跡の配置が可能です。
|
|
作図理論
|
単独車両、トラクタ
|
「旋回軌跡による偶角部の設計について」 *1
|
|
トレーラ
|
「セミトレーラ及びフルトレーラの直角旋回軌跡図の様式」(JASO Z006-92)*2
|
|
クロソイド
|
「クロソイドハンドブック」 *3
|
|
セミトレーラの連結最小回転半径
|
JASO Z107-04様式による計算 *2
|
*1:旧建設省 土木研究所道路部道路研究室 「土木研究所資料」No1453 1979.1
*2:社団法人 自動車技術会
*3:社団法人 日本道路協会
■
IP法 と 要素法 の違い
◆
IP法
◆
・IP法は、折れ線で走行ルートを指定します。
・複数の旋回がある場合は一度に全走行ルートを指定することができます。
・入力方法が直観的で、走行ルートの途中で旋回の挿入や削除が容易に可能です。
・道路上を走行するような比較的長い走行ルートの旋回軌跡に適しています。
・Uターンやループ旋回が含まれる場合は要素法をお使いください。
◆
要素法
◆
・要素法は、スタート位置から旋回要素を一つ一つ順番に指定します。
・駐車場や狭いクランク道路上を走行するような詳細な旋回軌跡の検討に適しています。
・バック旋回、Uターン、ループ旋回なども作図することが可能です。
・途中の旋回条件を変更すると、それ以降の走行ルートが大きく変わる事があります。
 要素法は
こちら
要素法は
こちら
■
ダイアログ画面
(画像をクリックすると拡大します)
|
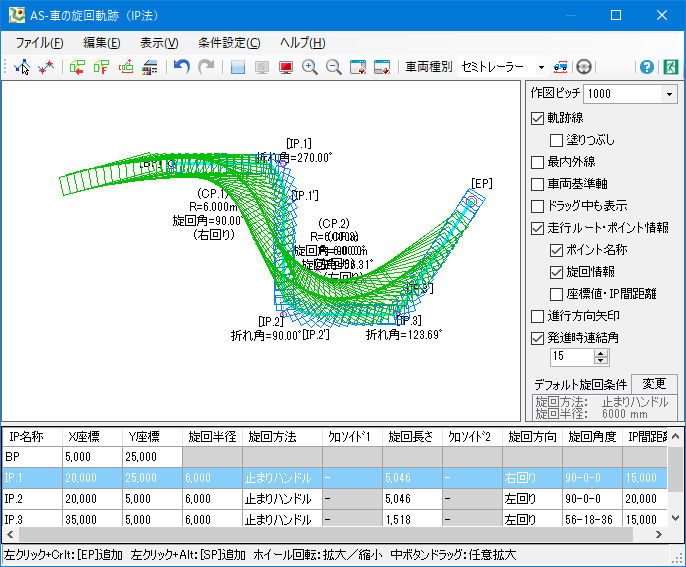
◆
メインダイアログ
◆
|
◆
単独車両諸元変更ダイアログ
◆
|
|
|
|
◆
セミトレーラ諸元変更ダイアログ
◆
|
◆
フルトレーラ諸元変更ダイアログ
◆
|
|
|
■
走行ルートと旋回方法
「走行ルート」は、折れ線(ポリライン)で指定さる基準線を元に円弧と直線により構成された平面線形です。
車両または駆動車の前輪距の中心点は「走行ルート」上を移動するものとします。
基準線は始点[BP]、終点[EP]、中間点[IP(n)]で定義されます。
■
旋回方法
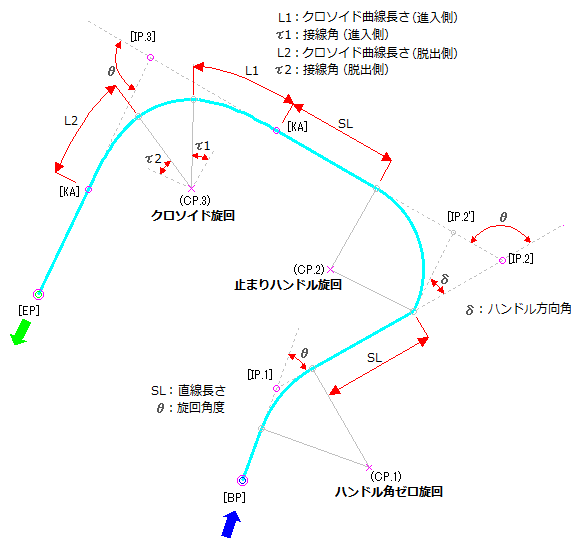
本コマンドでは以下の旋回方法が選択できます。
◆
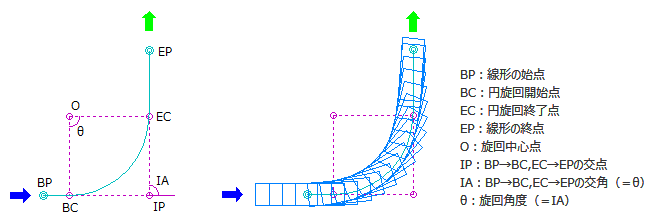
ハンドル角ゼロ旋回
◆
「ハンドル角ゼロ旋回」は、直線走行から円旋回に進入する時の角度がゼロになる旋回です。
線形は直線と円弧が直に繋がります。
連続したヘアピンカーブを徐行しながら走行する場合のように、ハンドルを切ったままほぼ一定した速度で旋回を行う方法です。
◆
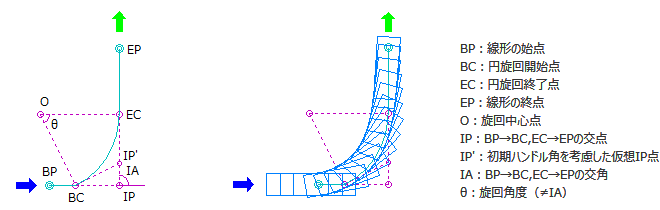
止まりハンドル旋回
◆
「止まりハンドル旋回」は、旋回前にハンドルを切り、据え切りのまま旋回をおこなう方法です。
クランク状の狭窄路を走行したり、狭い敷地をUターンする場合など、特に急旋回を行う必要がある場合などに用いる旋回方法です。
停止の状態でハンドルを切ってから旋回を始めるため、車両が向いている方向とは異なる方向に旋回を開始するのが特徴です。
◆
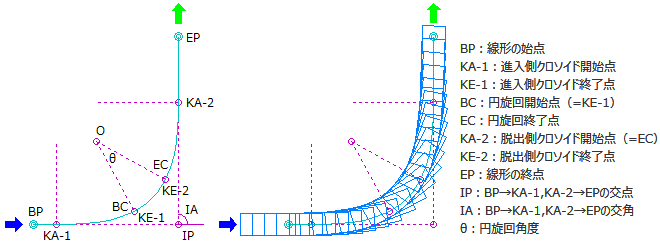
[クロソイド旋回]
◆
「クロソイド旋回」は、直線走行部から一定の角速度でハンドルを切り続け、円弧旋回に移るとハンドルを切ったまま固定しておき、次にハンドルを一定の角速度で戻す走行方法です。
高速走行の場合は、直線から一気にハンドルを切り円弧旋回に移るのは困難ですが、「クロソイド旋回」ではスムーズなハンドル操作になります。
■
作図例
(画像をクリックすると拡大します)
|
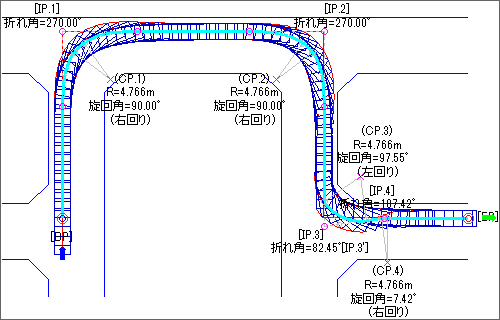
◆
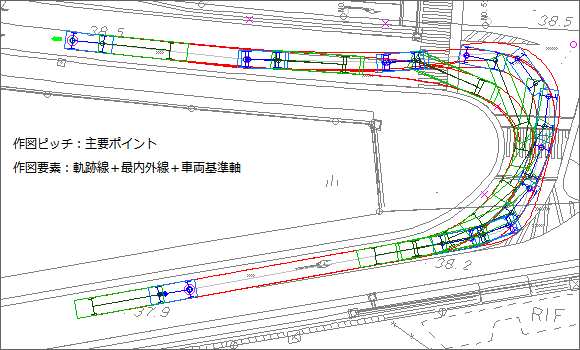
図面上に配置した作図例
◆
|
◆
単独車両作図例
◆
|
|
|
|
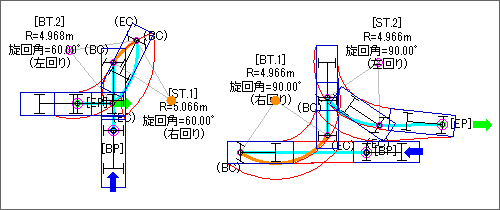
◆
セミトレーラ作図例
◆
|
◆
フルトレーラ作図例
◆
|
|
|
|
◆
積載物作図例-1
◆
|
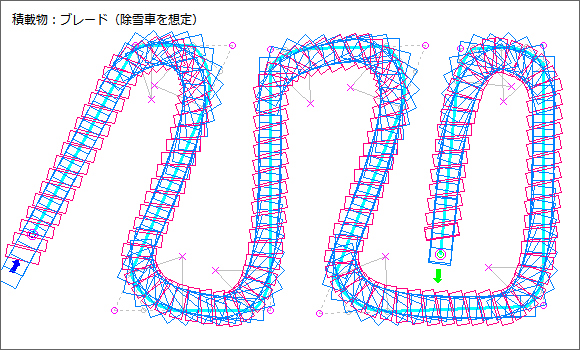
◆
積載物作図例-2
◆
|
|
|
|
◆
積載物作図例-3
◆
|
◆
車両寸法図作図例2
◆
|
|
|
■
走行シミュレーション
走行状況をシミュレーションしコマ送りやアニメーションで確認することができます。
背景を透過して道路や敷地図上を車を走行させることができます。
会員専用プログラムのページへ